En tant qu’instrument de mesure de précision au niveau du micron (μm), la précision de mesure du Laser Tracker a été reconnue par de nombreuses industries de fabrication de pointe et instituts de recherche, avec une présence dans le monde entier. Un seul laser tracker est capable de réaliser des mesures de très haute précision.
Il existe cependant certains projets d’ingénierie de précision, avec des exigences plus strictes en matière de précision des mesures. Parfois, cela est dû à des pièces mobiles sur un robot ou un environnement de mesure dynamique ou à la nécessité de réduire l’erreur d’angle de mesure en temps réel. Pour des applications telles que celles-ci, API a développé une solution de mesure qui utilise plusieurs Radian Laser Trackers capturant des données simultanément pour créer une carte de données dynamique pour l’environnement de mesure. Cette solution réalise des mesures dynamiques et de haute précision 6DoF et améliore considérablement la précision de la mesure de la cible.
Les sections suivantes détaillent les composants de cette solution Multi-Tracker et montrent trois applications où elle peut encore améliorer la précision des mesures.
Composition du système
1. Le Laser Tracker API Radian Pro
Le Radian Pro Laser Tracker d’API est équipé de lasers ADM (distance absolue) et IFM (interféromètre); Le laser IFM est le standard de mesure de longueur, qui offre une garantie de haute précision et une traçabilité des données pour l’ensemble du système.
2. Système de synchronisation de données TTL (ou autre)
Un système de synchronisation de données est un appareil qui peut déclencher plusieurs Laser Trackers pour collecter des données en même temps. Il y a un générateur de signal spécial dans ce système, et ce générateur utilise un signal d’impulsion pour ordonner aux multiples trackers de collecter des données en même temps. L’utilisateur peut définir l’ordre dans lequel les trackers sont déclenchés pendant la tâche de mesure.
3. Logiciel de traitement synchrone du signal API
Ce logiciel est la propriété de l’API et est utilisé pour analyser les données collectées à partir de plusieurs trackers. Le logiciel peut répondre à divers besoins, notamment l’unification des coordonnées de plusieurs trackers, la définition des coordonnées de la cible et l’analyse synchrone des données collectées.
Exemples d’applications
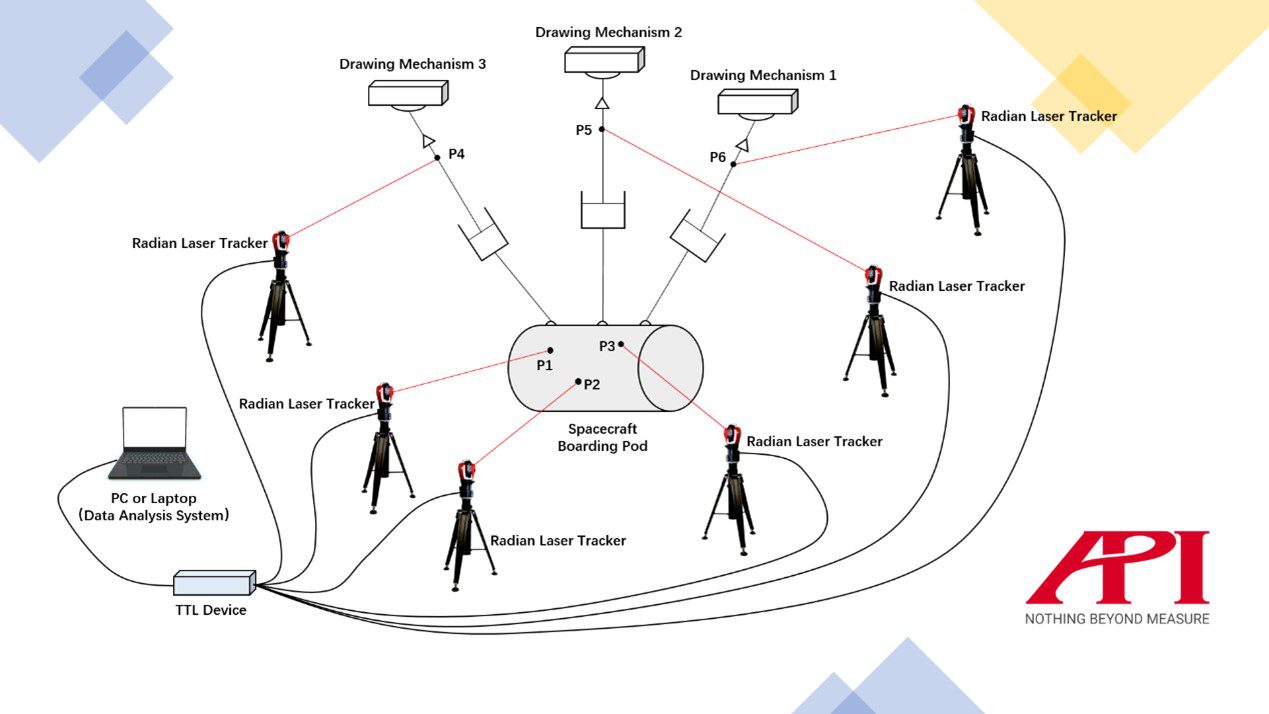
Image 1 : Schéma de principe du module d’atterrissage de l’engin spatial Mesure à 6 degrés de liberté avec la solution de mesure API Multi-Trackers
1. 6 DoF mesure, surveillance, contrôle et ajustement en temps réel du module d’atterrissage de l’engin spatial
But de la mesure
Le module d’atterrissage du vaisseau spatial est affecté par la gravité, le flux d’air et de nombreux autres facteurs dans le processus d’atterrissage, qui provoquent tous des secousses. Dans cette application, le mécanisme d’étirement est utilisé pour simuler ces forces, provoquant le tremblement du module d’atterrissage, tandis que plusieurs Laser Trackers sont utilisés pour surveiller de manière synchrone la relation mathématique entre les points de référence, afin d’obtenir des données scientifiques. À l’aide des données, la force et la direction du jet de propulseur au bas du module d’atterrissage peuvent être ajustées, de sorte que le module d’atterrissage puisse atterrir de manière stable.
Processus de mesure
Trois points, P1, P2 et P3, sont définis sur le module d’atterrissage, et trois Radian Pro Laser Tracker sont utilisés pour effectuer la mesure de suivi dynamique en temps réel et la surveillance de ses données 6 DoF. Trois autres traceurs laser Radian Pro sont utilisés pour le suivi et la surveillance en temps réel des points P4, P5 et P6, situés sur le mécanisme d’étirement. Les 6 Laser Trackers sont déclenchés pour mesurer en même temps par le synchroniseur, puis les données enregistrées sont envoyées au PC ou à l’ordinateur portable. Un logiciel de traitement synchrone est utilisé pour analyser les données, et la relation mathématique entre les points de référence, puis la force de poussée et la direction de la fusée sont ajustées en fonction des données.

Image 2 : Mesure dynamique de 6 DoF de robot industriel par multi-trackers
2. Mesure dynamique du robot industriel 6 DoF
But de la mesure
Mesurer la précision dynamique 6 DoF des robots industriels, afin de mieux évaluer la précision spatiale de chaque position du robot dans sa trajectoire de déplacement, et, selon les données, la compensation des données correspondantes et l’optimisation de la trajectoire de travail du robot sont effectuées .
Processus de mesure
Le support de rétroréflecteur à montage sphérique (SMR) est disposé à l’extrémité du robot industriel et trois SMR sont disposés sur le support. Trois laser trackers suivent respectivement un SMR, et les données de position de chaque SMR tout au long du processus de mouvement sont collectées et mesurées dynamiquement en temps réel. Les données collectées sont renvoyées au PC ou à l’ordinateur portable pour le calcul et servent de support de données pour l’étalonnage et la compensation du robot.
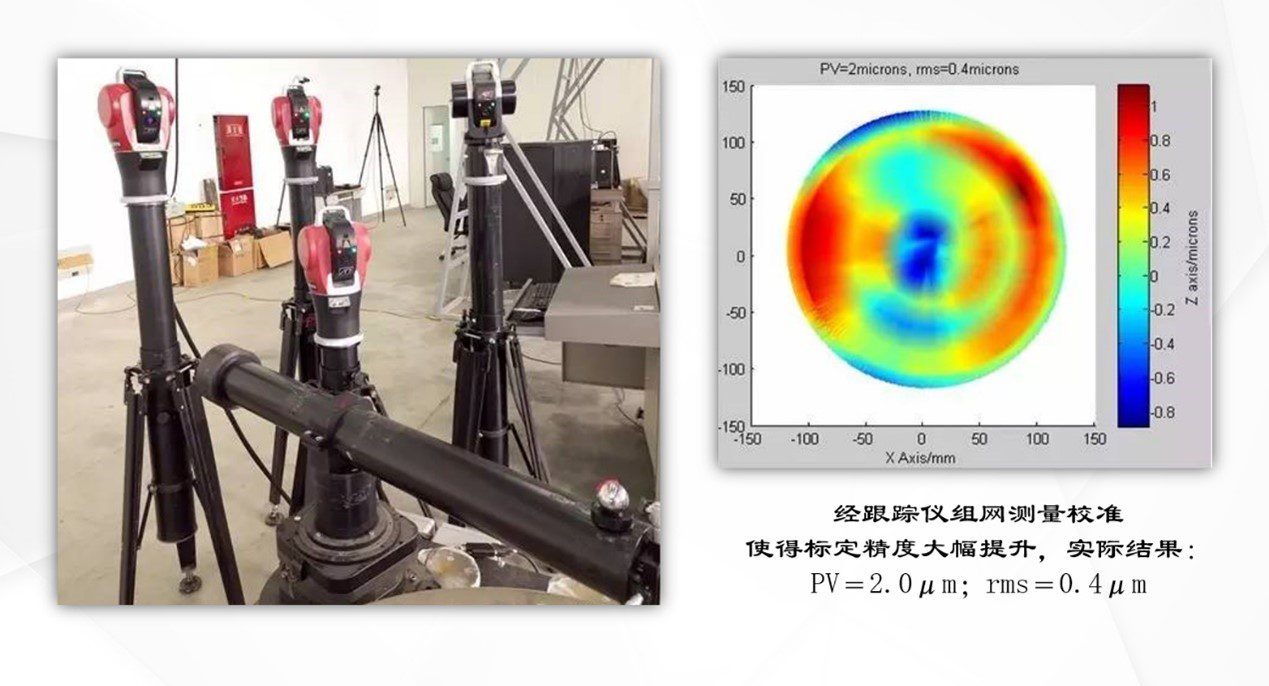
Image 3 : Quatre laser trackers sont utilisés pour mesurer de grands miroirs asphériques avec une haute précision
3. Mesure de très haute précision de la cible mesurée
But de la mesure
Améliorer considérablement la précision de mesure des objets mesurés. Avec un développement rapide, les systèmes optiques asphériques à grande échelle ont été de plus en plus utilisés dans les domaines de l’observation astronomique et de l’optique spatiale, et sont devenus le courant dominant du développement de systèmes optiques. Cependant, la détection en position de grandes surfaces asphériques (en particulier les surfaces asphériques convexes) est très difficile, ce qui est l’un des goulots d’étranglement techniques limitant le développement de tels systèmes optiques. Pour résoudre ce problème, un sujet de recherche populaire est de savoir comment appliquer la technologie de détection de contour de bras oscillant pour une détection en position de haute précision.
Processus de mesure
90% de l’erreur de mesure d’un seul Laser Tracker provient d’une erreur angulaire. Dans la solution multi tracker de l’API, plusieurs trackers mesurent un point en même temps, et calculent sa position en fonction des multiples points de données collectés en fonction de la propre position du tracker ainsi que de l’emplacement du point, afin d’éviter au maximum le tracker erreur angulaire.
Conclusion
Les cas d’application ci-dessus mettent en évidence la capacité et l’opérabilité de la solution de mesure multi-tracker dans la réalisation de 6 DoF, la mesure et la surveillance dynamiques et de haute précision d’une cible et améliorant considérablement la précision de mesure de la position cible.